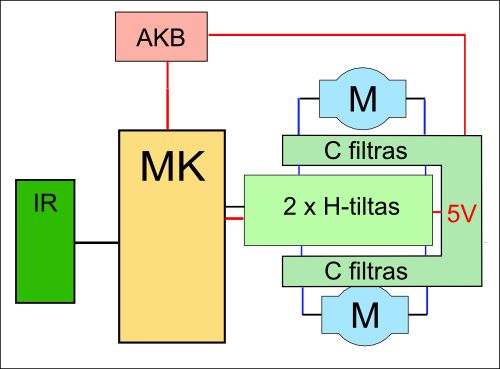
Pradėjus testuoti realius važiavimus išlindo pirmieji povandeniniai akmenys 🙂 Juk kitaip ir negali būti. Robotukas važiavo max. 2 sekundes, o paskui "užlinkdavo" kontroleris. Bėdos – kolektoriniai varikliukai. Juose stovi šepetėliai, kurie stipriai kibirkščiuoja, sukelia elektromagnetinius trukdžius ir visos tos "šiukšlės" persiduodavo kontroleriui, aišku jis to neištverdavo ir pasakydavo – "Nea, aš taip nežaidžiu". Prie viso to dar 5V reguliatorius ant kontrolerio nesugebėjo išspausti reikiamo galimgumo varikliukų užmaitinimui, todėl sprendimas – papildomas blokas su 5V reguliatoriumi ir kondensatorių (C) filtrais kiekvienam varikliukui.
Filtrų bloko schema:
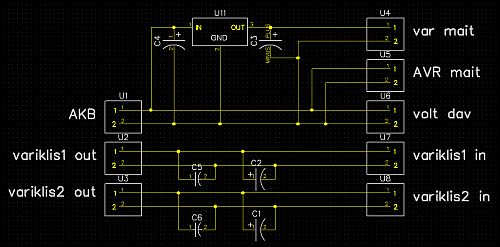
Spausdintinė plokštė:

o čia jei kas užsimanys DipTrace visi failiukai

va tokia "grožybė" gavosi, radiatorių reikės dėti didesnį – vis tik šyla jis.
