
 Kaip jau rašiau – linijos sekimui naudojame IR (infraraudonųjų spindulių) "akytes" (daviklius). Mes pasitarėm ir aš eilinį kart nusprendžiau ( "mi pasovetovalis' i ja reshil…") – naudojam 2 moduliukus iš viso 4 daviklius linijos padėčiai nustatyti (2 kanalų infraraudonųjų spindulių linijos sekimo sensorius).
Kaip jau rašiau – linijos sekimui naudojame IR (infraraudonųjų spindulių) "akytes" (daviklius). Mes pasitarėm ir aš eilinį kart nusprendžiau ( "mi pasovetovalis' i ja reshil…") – naudojam 2 moduliukus iš viso 4 daviklius linijos padėčiai nustatyti (2 kanalų infraraudonųjų spindulių linijos sekimo sensorius).
Sumontuoti jie atrodo taip:
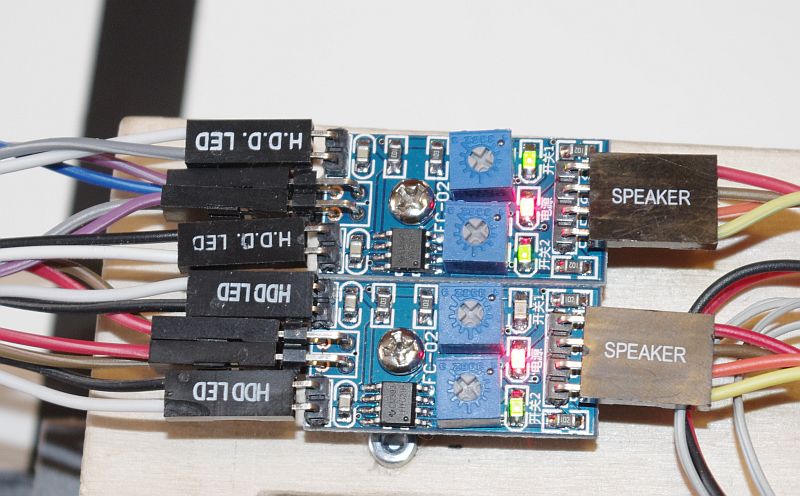
Komparatorius su šviesos diodų indikacija

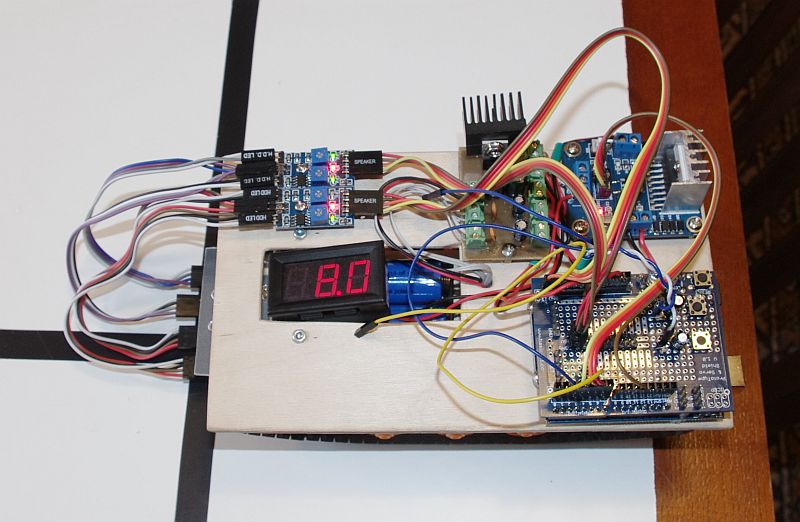
Bendras vaizdas

Patys UV davikliai (4 suporuoti UV siųstuvai-imtuvai)
p.s. nesijuokit – jungčių kištukai išlupti iš senų kompų, todel ant jų dar likė užrašai "HDD LED", "SPEAKER" ir t.t. ateity padarysim lipdukus kad sumarkiruot visas jungteles ir nepasimest laikui begant 🙂
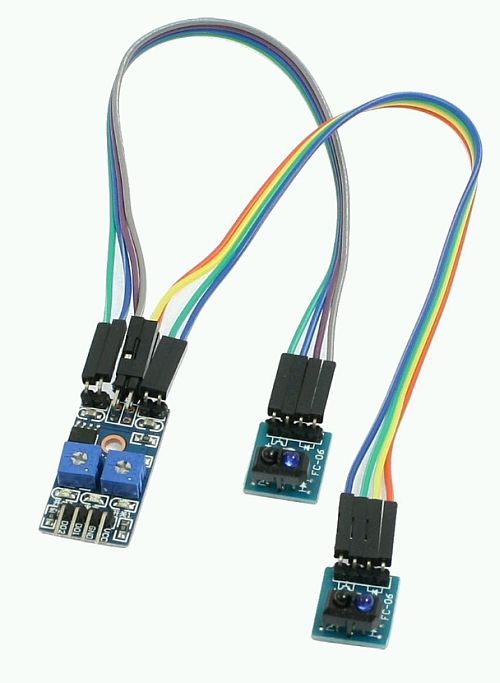
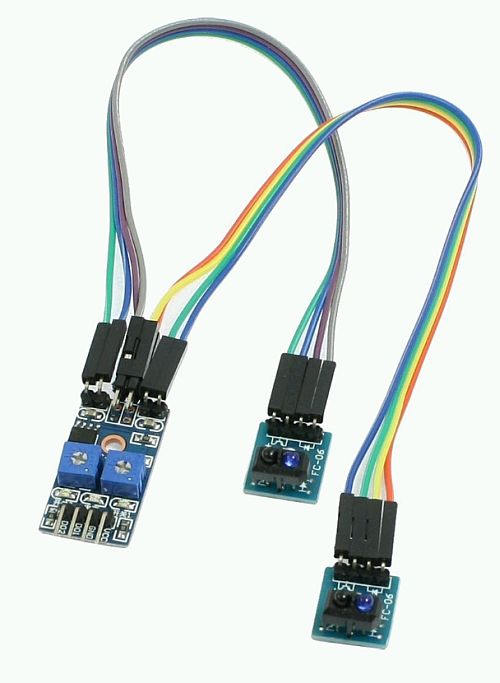 Kadangi rungtis – linijos sekimas, mūsų robotukas turi aptikti tą liniją. Linijos aptikimui naudosime infraraudonųjų spindulių daviklius. Pats daviklis sudarytas iš infraraudonųjų spindulių (IR) siūstuvo – IR šviesos diodo, IR imtuvo – IR foto diodo ir komparatoriaus, kuris analoginį signalą pavers į skaitmeninį.
Kadangi rungtis – linijos sekimas, mūsų robotukas turi aptikti tą liniją. Linijos aptikimui naudosime infraraudonųjų spindulių daviklius. Pats daviklis sudarytas iš infraraudonųjų spindulių (IR) siūstuvo – IR šviesos diodo, IR imtuvo – IR foto diodo ir komparatoriaus, kuris analoginį signalą pavers į skaitmeninį.