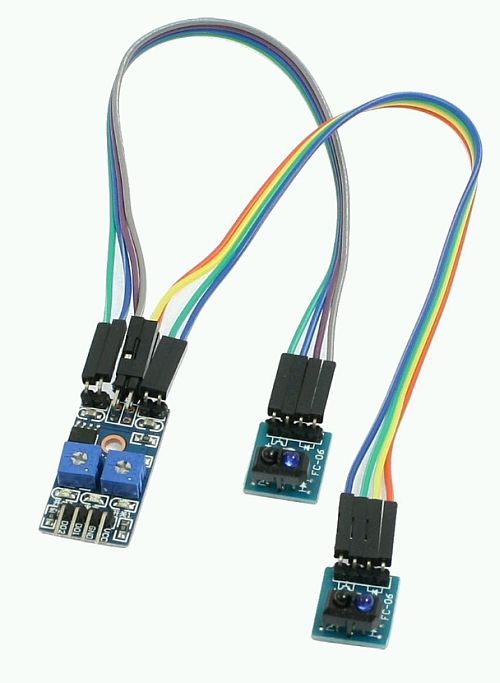
 Kadangi rungtis – linijos sekimas, mūsų robotukas turi aptikti tą liniją. Linijos aptikimui naudosime infraraudonųjų spindulių daviklius. Pats daviklis sudarytas iš infraraudonųjų spindulių (IR) siūstuvo – IR šviesos diodo, IR imtuvo – IR foto diodo ir komparatoriaus, kuris analoginį signalą pavers į skaitmeninį.
Kadangi rungtis – linijos sekimas, mūsų robotukas turi aptikti tą liniją. Linijos aptikimui naudosime infraraudonųjų spindulių daviklius. Pats daviklis sudarytas iš infraraudonųjų spindulių (IR) siūstuvo – IR šviesos diodo, IR imtuvo – IR foto diodo ir komparatoriaus, kuris analoginį signalą pavers į skaitmeninį.
Baltas paviršius atspindi spindulius, juodas paviršius juos sugeria. Kadangi nera tokių idealių baltų-juodų paviršių kurie sugeria visu 100 procentų – tam reikalingas komapratorius. Mes matuojame atsispindinčius IR, todėl reguliuojame komparatorių pavyzdžiui taip, kad jei IR yra iki 30 procentų – tai bus juodas paviršius – loginis 0, jei daugiau nei 30 procentų – baltas paviršius – loginis 1. Reguliavimas ir jautrumas bus nustatyti bandymo metu, jautrumas priklausys nuo išorinio apšvietimo, paviršiaus, atstumo iki linijos ir t.t.
„akytės“ linijos sekimui
[…] Kaip jau rašiau – linijos sekimui naudojame IR (infraraudonųjų spindulių) "akytes" (daviklius). […]